

- HOME >
- KEY×CON⁺交差点制御
AGVの交差点制御 KEY×CON⁺

AGVの運用には交差点が必要です
AGV(自動搬送ロボット)はスタンドアローン型の制御方式により自律走行するロボットであり、上位コンピュータからの無線指示がなければ、他のAGVの位置や動作状況を把握することができません。
そのため、交差点や合流地点では、AGV同士が衝突したり、センサーによって互いに停止しあって進行できなくなるといった問題が発生し、円滑な運用が困難となる場合があります。
これを解決するため、多くの現場では制御盤やパソコンなどの大規模な制御システムを構築し、構内にWi-Fiネットワークを張り巡らせて、各AGVの運行状況を一括で把握・管理する仕組みを導入しています。しかし、こうしたシステムは非常に高額となることが多く、AGV本体よりも高コストとなるケースも珍しくありません。場合によっては、1か所の交差点処理が困難なために、全体の導入計画が凍結されることもあります。
「KEY×CON」は、こうした課題に対して、従来のシステムよりも桁違いに低コストで交差点制御を可能にする画期的な専用システムです。
物流現場においてAGVを有効に活用するためには、柔軟なコースレイアウトを低コストで実現することが不可欠であり、KEY×CONはその実現を強力にサポートします。
AGV運用で交差点は必要なのか?

複数台のAGV(自動搬送ロボット)を運用する際には、遠回りのルートを走行する車両と、短距離ルートを走行する車両とが分岐・合流したり、待機ステーションで一時的に離脱して荷物の積み下ろしを行い、その後再び幹線ルートに復帰するなど、コースレイアウトには多様な設計が求められます。
仮に一筆書きの単純なコースしか構築できないとすれば、それはAGV運用の大きな限界を意味します。
このような柔軟なコース設計を可能にする上で、分岐点や合流点の存在は非常に重要な要素です。こうした機能を持たないAGVで効率的な運用を目指すことは、現実的には困難と言えるでしょう。
AGVを自由な発想で最大限に活用するためには、コース設計において「交差点」という要素が不可欠です。
大掛かりな統括システムが不要なシンプルな交差点制御
私たちが自動車を運転する際、自車と他車が合流・すれ違う状況でどのように判断しているでしょうか。赤信号では停止し、青信号では進行する――こうした交通ルールに従って、安全な運転を行っています。
しかし、信号のない見通しの悪い細道ではどうでしょうか。急に横から別の車が現れれば、衝突の危険があります。双方が低速で走行し、手前で互いに気づけば回避できますが、譲り合いすぎて進めなくなることもあります。交通ルールがなければ、どちらに優先権があるかも分からず、混乱が生じるのです。
AGV(自動搬送ロボット)は、まさにこのような「信号のない細道をルールなしで走行している」状態に似ています。
では、AGV同士の衝突を確実に防ぐにはどうすれば良いのでしょうか。最も確実な方法は「統括管理」です。各AGVの動きを一元的に管理し、全体の状況を把握しながら「次はこのAGVが進行」「次は停止」と順番を決めて運用することで、最適な走行経路とタイミングを示すことができます。これにより、安全かつ効率的な運用が可能となります。
ただし、このようなシステムを構築するには、大規模なインフラと非常に高額なコストがかかるという課題があります。
一方で、私たちの日常の車の運転はどうでしょうか。信号や標識といったシンプルなルールに基づいてスムーズに進行しています。信号機は交差点の進行と停止を制御するだけで、町全体の車両を管理しているわけではありません。
MONOLIXの「KEY×CON」は、まさにこの信号機のような役割をAGVに対して果たす装置です。シンプルながらも的確な交差点制御により、AGVの効率的な運用と安全性を低コストで実現します。

KEY×CONシリーズはリモコンから始まった
KEY×CONによる交差点制御の基本機能の一つは、AGV(自動搬送ロボット)を停止および発進させる制御です。
KEY×CONの開発の原点は、まさに「AGVを止める・走らせる」というシンプルなリモコン制御にあります。複数台のAGVにそれぞれ固有の番号を割り当て、リモコンの対応するボタンを操作することで、対象のAGVを発進させ、もう一度押すと停止させる――ただそれだけの、極めて簡潔な制御から始まりました。

リモコンの運用
このリモコン機能は、「フォークリフト作業者が車両から降りることなくAGVを操作したい」という現場からの要望に応えて開発されました。
具体的には、パレットを牽引しているAGVをリモコンで一時停止させ、フォークリフトでパレットを積載。その後、リモコン操作でAGVを再び発進させるという運用を可能にしたものです。
もしリモコンがなければ、作業者は一度フォークリフトから降りてAGVを停止させ、再び乗ってパレットを積み、もう一度降りてAGVを発進させてから再び乗車…というように、2度もフォークリフトを離れる必要があります。
このリモコン機能は、そうした手間を省き、作業効率を大幅に改善する手段として現場で高く評価され、堅実に販売実績を伸ばしてきました。
交差点制御に必要なもの
AGVに対して「走る」「止まる」の指示を電波で行えるリモコンが登場したことで、交差点制御の実現に一歩近づきました。
しかし、それだけでは不十分です。次に必要となるのは、「ここが交差点である」という認識をAGVが持つことです。
自動車の運転に例えるなら、停止線や標識が「ここから先は交差点で、他の車両が横から進入してくるかもしれない」と警告してくれるようなものです。
AGVも同様に、「現在、自分が交差点に進入したのか、通過中なのか、すでに出たのか」を正確に認識でき、それを周囲に示すことができれば、他のAGVがその情報を受け取って適切に行動することが可能になります。
たとえば、交差点内に既に進入しているAGVが「現在、交差点内にいます」という信号を発信し、それを受け取った別のAGVが交差点手前で「停止」を選択できれば、衝突のない、安全な交差点制御が実現できます。
これこそが、安全性と効率性を両立する交差点制御の基本的な構想です。
実際のAGVのコースイメージ
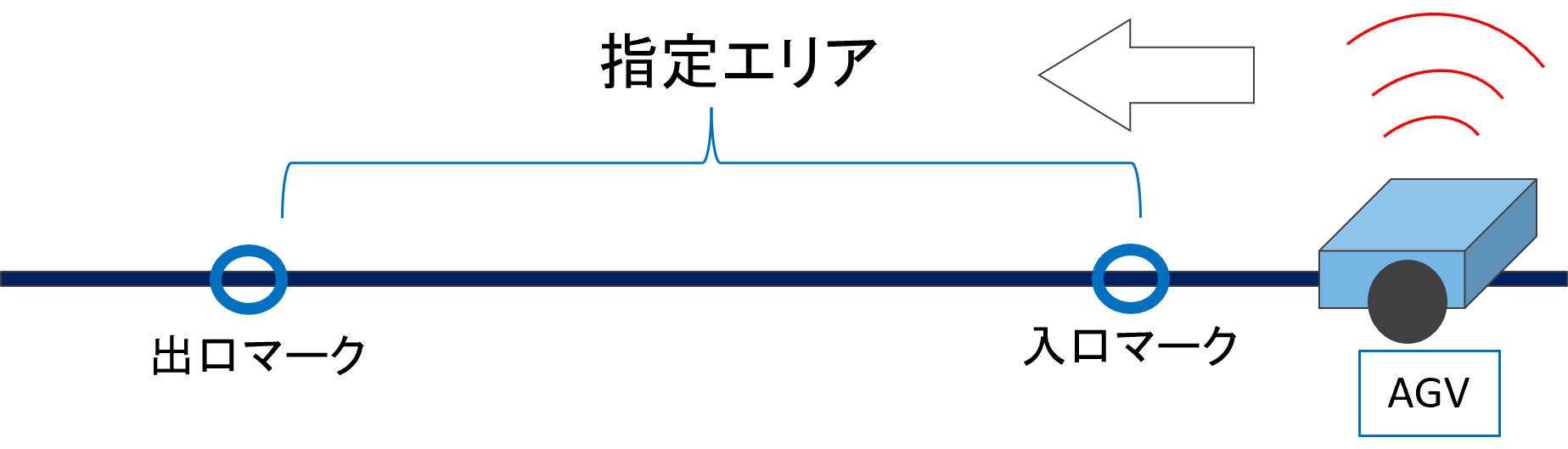
左の図のように床に入口と出口のマークを貼り、それを認識したら指定エリア内に侵入・退出したことをAGV側で認識します
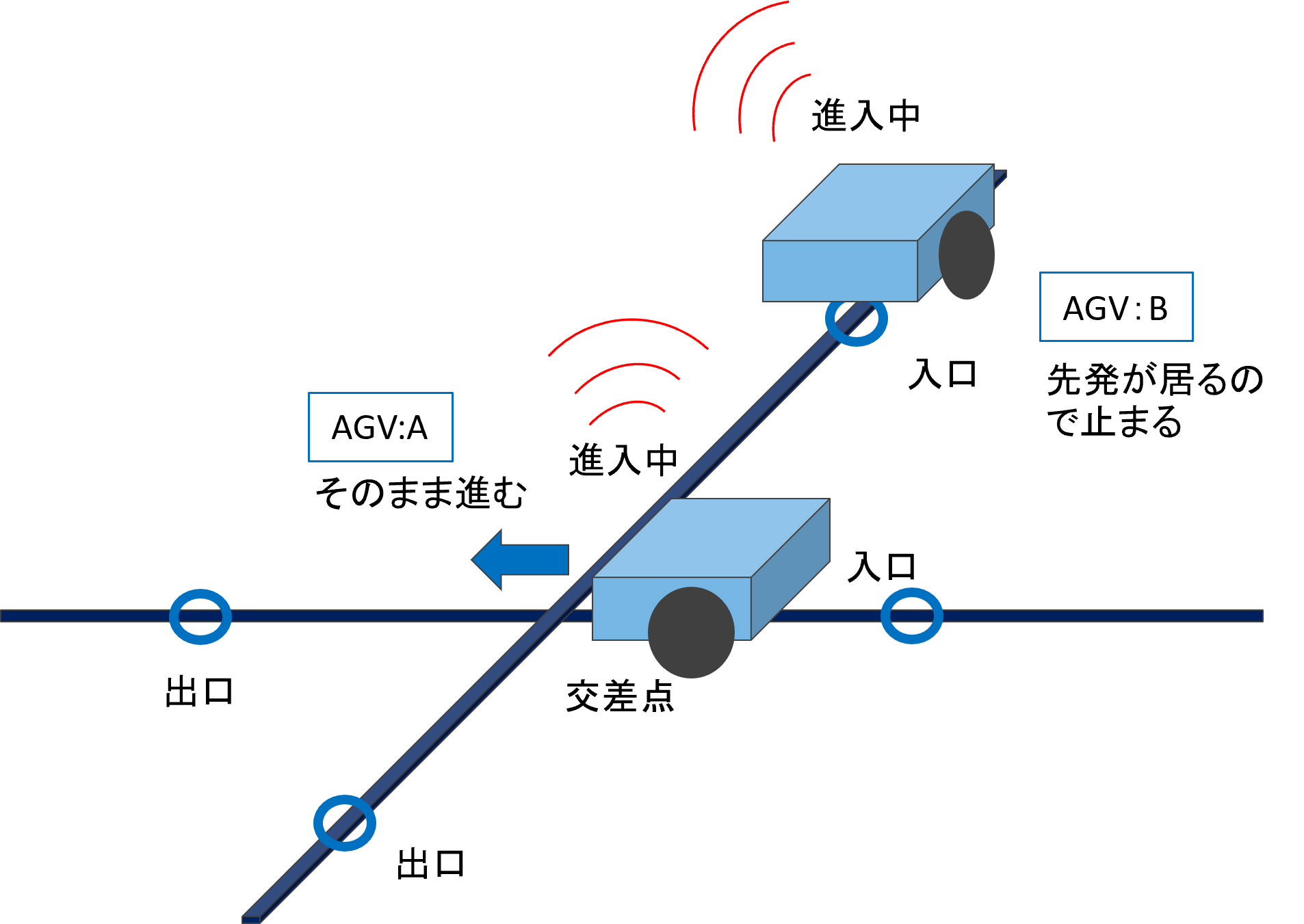
上図のように、AGVの走行ルートが交差する場面では、すでに交差点内に進入しているAGVがいる場合、後続のAGVは交差点手前でその存在に気づき、停止することが可能です。
先行するAGVが交差点の出口マークを読み取り、交差点エリアから完全に退出したことを確認すると、後続のAGVは「交差点内が空いた」と判断し、安全に発進します。このときも、交差点に進入したAGVは「自分は今、交差点内にいる」という状態を周囲に通知しながら進行します。
この制御方式には、地上から全体を統括するようなシステムは存在しません。AGVは床に貼られたマークを読み取ることで、交差点に「侵入した」または「退出した」ことを判断し、それを周囲に発信します。そして、別のAGVが同じ交差点に進入しようとした際、すでに先行するAGVが交差点内にいるという情報を受け取り、自主的に「停止」を選択するのです。
この仕組みは、「早い者勝ち」というシンプルな交通ルールをすべてのAGVが個別に守ることで成り立っており、統合的な運行管理システムなしでも、安全かつ効率的な交差点通行を実現します。
KEY×CONの機器構成
【AGV本体と走行ルート】
各社・各機種のAGVに対応しており、異種AGVの運用も可能です。現場の特徴に合わせてAGVを選択することが可能です
各社・各機種のAGVに対応しており、異種AGVの運用も可能です。現場の特徴に合わせてAGVを選択することが可能です

【KEY×CON本体】
AGV1台に1台取り付けます。お互いの電波の受送信と判断を行います。
AGVと繋ぎ、停止・発進の信号を出力します。QRリーダーもここに繋ぎます。
AGV1台に1台取り付けます。お互いの電波の受送信と判断を行います。
AGVと繋ぎ、停止・発進の信号を出力します。QRリーダーもここに繋ぎます。

【QRリーダー】
KEY×CON本体に接続。床のQRマークを読み取り、KEY×CON本体に状況を報告します。
KEY×CON本体に接続。床のQRマークを読み取り、KEY×CON本体に状況を報告します。

【QRシート】
コースに沿って床に貼ります。複数個のQRコードは同じ内容で読み取りミス率を減らしています。表面に汚れや剥がれに強い保護を施しています。裏面が粘着テープになっています。シート内のマーク情報が複数あり、複数ヵ所の交差点に対応します。
コースに沿って床に貼ります。複数個のQRコードは同じ内容で読み取りミス率を減らしています。表面に汚れや剥がれに強い保護を施しています。裏面が粘着テープになっています。シート内のマーク情報が複数あり、複数ヵ所の交差点に対応します。
実際のKEY×CON交差点運用

AGVに「KEY×CON」本体およびQRリーダーを取り付け、交差点コースを構成します。床面には、交差点の入口および出口を示すQRシートを貼付します。
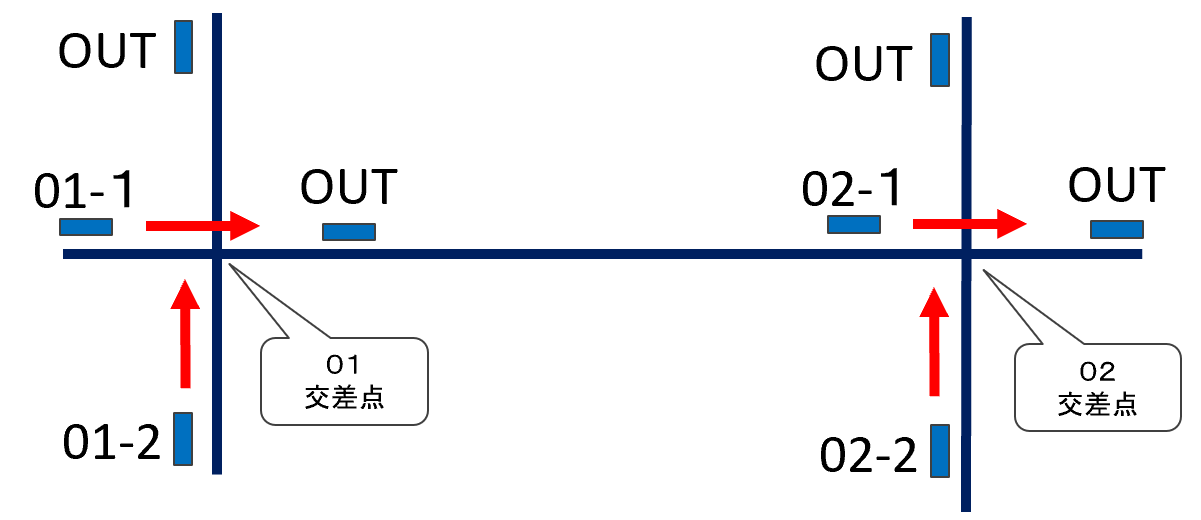
QRシートの入口(IN)は、交差点を識別する「大数字」(01〜10)と、交差点内での優先順位を示す「枝番(小数字)」(1〜4)で構成されます。
大数字:交差点番号を表します
枝番(小数字):その交差点におけるAGVの進入優先順位を表します
出口については、共通の「OUT」マークを使用します。
たとえば、左図のように2方向から進入する交差点では、入口に「IN01-1」と「IN01-2」のQRシートを貼付し、出口には共通の「OUT」マークを設置します。
【枝番:優先順位】交差点制御は基本動作として、先に進入した側のAGVが先に通行し、後着が停止して待ちます。ただし、先着が進入最中に両方の入口に1台づつ到着することがあります。その場合に予め優先側を決めておき数字の小さい方が先に発進することとします。これにより幹線通路側と支線通路側の優先順位を作ることが出来ます。
交差点番号(大数字)
開発初期、QRリーダーを使わず磁気センサーで交差点の有無を認識する方法を取っていましたが、交差点の違いを認識できない為、全ての交差点で通行できるAGVが1台と限られました。(現在廃版生産終了)
QRコード仕様になり、交差点にNO.を付け、各交差点ごとに優先判断を行うことが出来るようになりました。これにより交差点の数が多く、AGV台数が多い場合の交差点制御が可能になります。
QRコード仕様になり、交差点にNO.を付け、各交差点ごとに優先判断を行うことが出来るようになりました。これにより交差点の数が多く、AGV台数が多い場合の交差点制御が可能になります。
交差点番号(大数字)No.はそれぞれの交差エリアごとに付けられたNo.で、隣の交差点と干渉しない工夫です。
KEY×CON⁺の設置要領(磁気誘導方式AGVの例)
ここでは、磁気誘導方式のAGV(キーカート)でKEY×CON⁺の交差点を作る要領を紹介します。

KEY×CONとQRリーダーは予めユニット化された状態で納入されます。※AGVの仕様に合わせてブラケットが異なります。
キーカートの場合、機種に合わせてユニットで納入されるので、組付け要領書に沿ってキーカートに取り付け、配線を行います。
キーカートの場合、機種に合わせてユニットで納入されるので、組付け要領書に沿ってキーカートに取り付け、配線を行います。
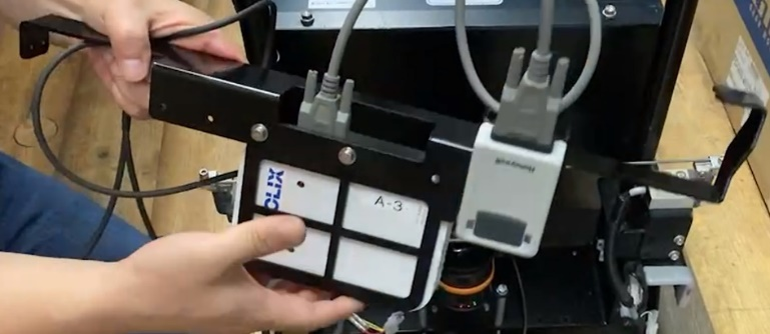
実際のKEY×CONユニット
キーカートに取り付ける前の写真です
(キーカートショートタイプ)
キーカートに取り付ける前の写真です
(キーカートショートタイプ)

QRリーダが床から適正な位置に来るよう設計されたユニットです。
微調整は不要です。
微調整は不要です。
次に、床に貼り付けるQRシートについて、説明します。

磁気誘導式AGV(キーカート)のコースが完成している状況です。

キーカートに取り付けたQRリーダーの位置より、磁気誘導ラインから決められた距離離して配置します。

すぐに裏面のテープで貼らずに養生テープなどで仮貼りを行い、走行テストの後に本貼りすることをお勧めします。
コース設定の注意事項
POINT1 走行速度は遅いほうが良い
AGVの速度はなるべく遅い方が読み取り不良が発生し辛いです。
AGVの速度はなるべく遅い方が読み取り不良が発生し辛いです。
10~25m/minで走行することを勧めます。
POINT2 直進中に読みましょう
AGVがカーブやコーナーを曲がっている最中は、走行が左右に不安定になり、QRコードから
外れる為、読み取り不良になる場合があります。
AGVが安定して直線を走ってところにQRコードを貼りましょう
POINT3 外光(太陽光)に弱いです
屋外からの光(太陽光)の強い場所では、QRコードの読み取り不良率が上がります
可能な限り太陽光の影響を受けづらい場所にQRコードを貼りましょう
POINT4 QRコードの汚れを定期的に落としましょう
QRコードシートは、表面を特殊な加工でコーティングしていますが、汚れが付いた場合
読み取り辛くなります。定期的な清掃を心掛けてください。
また、汚れや破損し辛い場所を選んで、QRコードを貼り付けましょう。
POINT5 交差点の範囲は小さく作りましょう
電波が安定して届く距離を確保する為、交差点の範囲はなるべく小さく作りましょう。
電波範囲は30m程度ですが、金属製の柱やラック、機械装置などの影響を受けて
著しく減衰する場合があります。
POINT6 停止タイミングにバラツキがあります
KEY×CONからAGVに停止(発進)信号を出して、実際に動作するまでにタイムラグが
生じます。相手のAGVに干渉しないよう、十分に間隔をとってコースを作ってください
POINT7 QRコードの上に透明保護テープを貼らない
QRシートは特殊な強化保護を施しています。QRコードの上に透明テープを貼ると反射率が変わり、読み取り不良の原因となります。見た目に透明であっても、光学的に読みづらい状態となります。QRコードに被らない、シート周囲の貼り付けは問題ありません。
KEY×CON⁺ さまざまな使い方
複数台 等間隔制御:ペースメーカー
【複数台AGV運用の渋滞】
複数のAGVで同一線上をグルグル回ることで連続的な搬送が可能になり、非常に高い効率の搬送運用が可能になります。
ただし、一度走行ピッチが詰まってしまうと、なかなか等ピッチに戻ってくれません。それにより作業の手待ちが起こり、その後一斉にAGVが到着することになり、作業効率が上がりません。
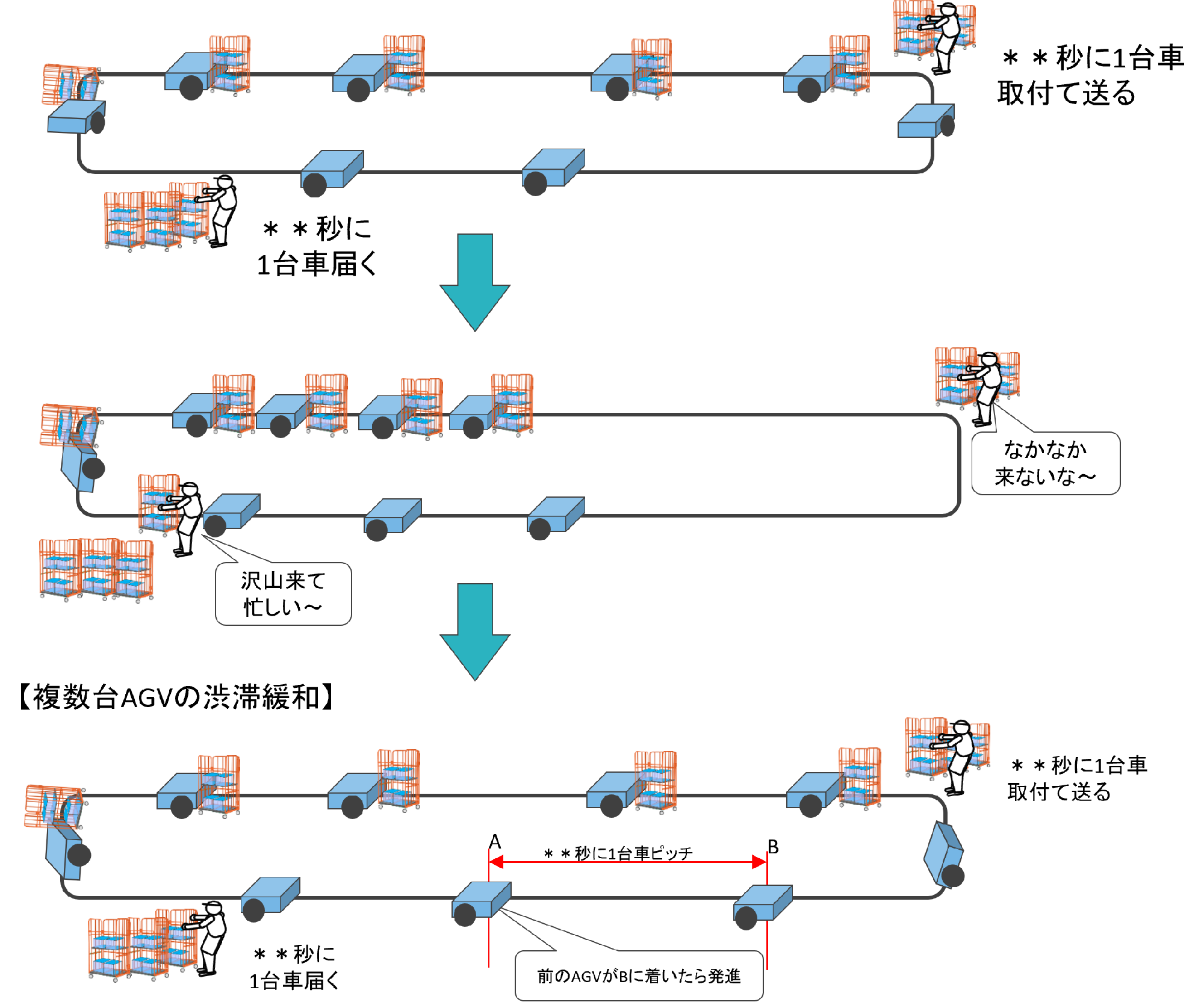
【KEY×CONによる等間隔制御】
前を走行するAGVがB地点に到着するまでA地点で後続車は待機する。A⇒Bの間は電波を発信しながら走行し、A地点の後続AGVを停める。Bまでの間に先行車が居なければ、そのまま走行する。周回全体でこのピッチが守られるので定期作業が可能になり、作業性が向上します。
前を走行するAGVがB地点に到着するまでA地点で後続車は待機する。A⇒Bの間は電波を発信しながら走行し、A地点の後続AGVを停める。Bまでの間に先行車が居なければ、そのまま走行する。周回全体でこのピッチが守られるので定期作業が可能になり、作業性が向上します。
1本線に入口と出口シートを貼ります。貼る距離間隔は上の図の1周をAGV台数で割った距離です。1周100mに10台のAGVが走っていれば10mです。入口⇔出口を10mで貼るだけで等間隔制御が完成します。
単線を2台のAGVが走る
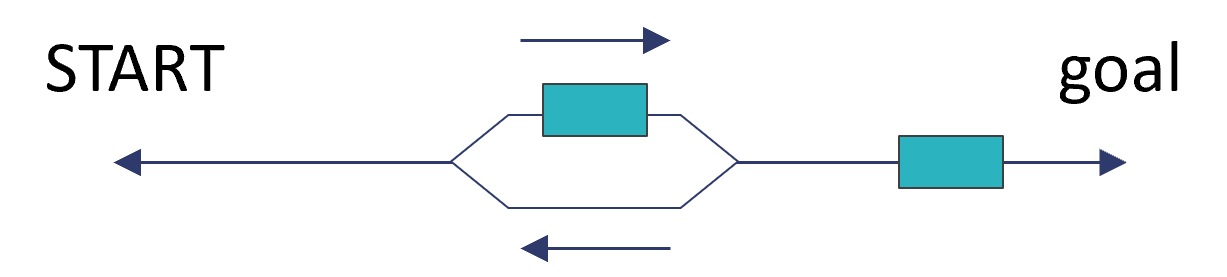
電車でよく使わせる制御方法ですが、単線の中央の駅で分岐して2台の電車が入れ替わる制御と同じ方法です。中央の駅に2台の電車が到着して、単線内に電車が居ないことを確認して入れ違いの電車が侵入します。
左図の中央駅上側のAGVがKEY×CON⁺入口01を読んで右側の単線に侵入し、Uターン又はバックで戻ってきます。戻ったAGVは中央駅下側に侵入して、出口を読みます。逆側も、中央駅下側から出発したもう1台のAGVが入口02を読み侵入し、単線を戻ってきます。お互いが駅に戻り出口マークを読むまでは、もう一台は単線に入ることは出来ません。
※ただし、単線の距離は電波の届く範囲(30m)程度までとなります。
左図の中央駅上側のAGVがKEY×CON⁺入口01を読んで右側の単線に侵入し、Uターン又はバックで戻ってきます。戻ったAGVは中央駅下側に侵入して、出口を読みます。逆側も、中央駅下側から出発したもう1台のAGVが入口02を読み侵入し、単線を戻ってきます。お互いが駅に戻り出口マークを読むまでは、もう一台は単線に入ることは出来ません。
※ただし、単線の距離は電波の届く範囲(30m)程度までとなります。
分岐・合流の2台運用
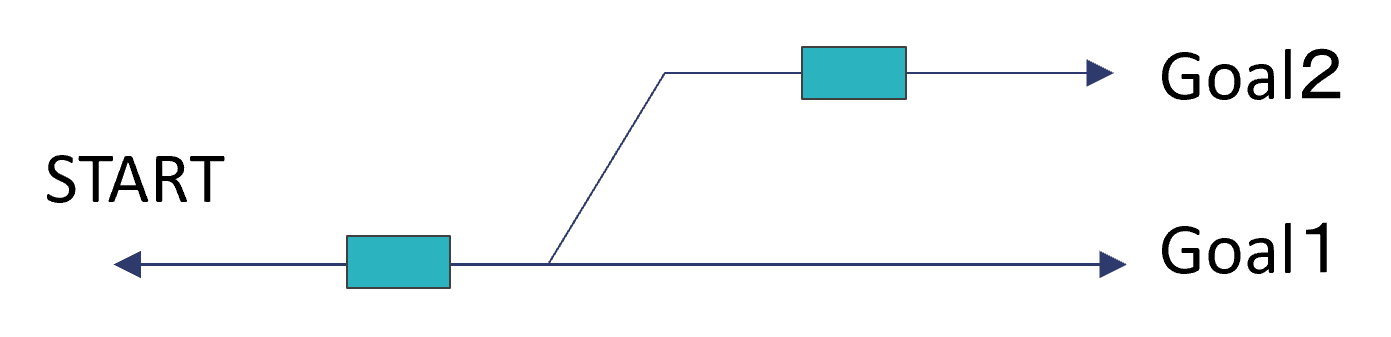
START→Goal1 START→Goal2にそれぞれ1台づつAGVが走行し、共通のSTARTを利用している。両方のAGVがSTARTに侵入すると衝突します。START→分岐間に相手のAGVが居ないことを確認してから侵入する必要があります。KEY×CON⁺を使えばこのような制御も簡単です。
※ただし、分岐⇔START間の距離は電波の届く範囲(30m程度)での運用となります。
※ただし、分岐⇔START間の距離は電波の届く範囲(30m程度)での運用となります。
交差点制御とあわせて使いたい機能

シートシャッター通過時の安全開閉制御
AGVが構内のいろいろなところを通過するとき、シートシャッター(クイックシャッター)を通過することもあります。シートシャッターは一般的に人感センサーでシャッター近くに人が近づくと開き、人気が無くなると閉まります。とても便利です。AGVがシートシャッターに接近すると人感センサーが働いてシャッターが開き、そのまま通過で出来ます。
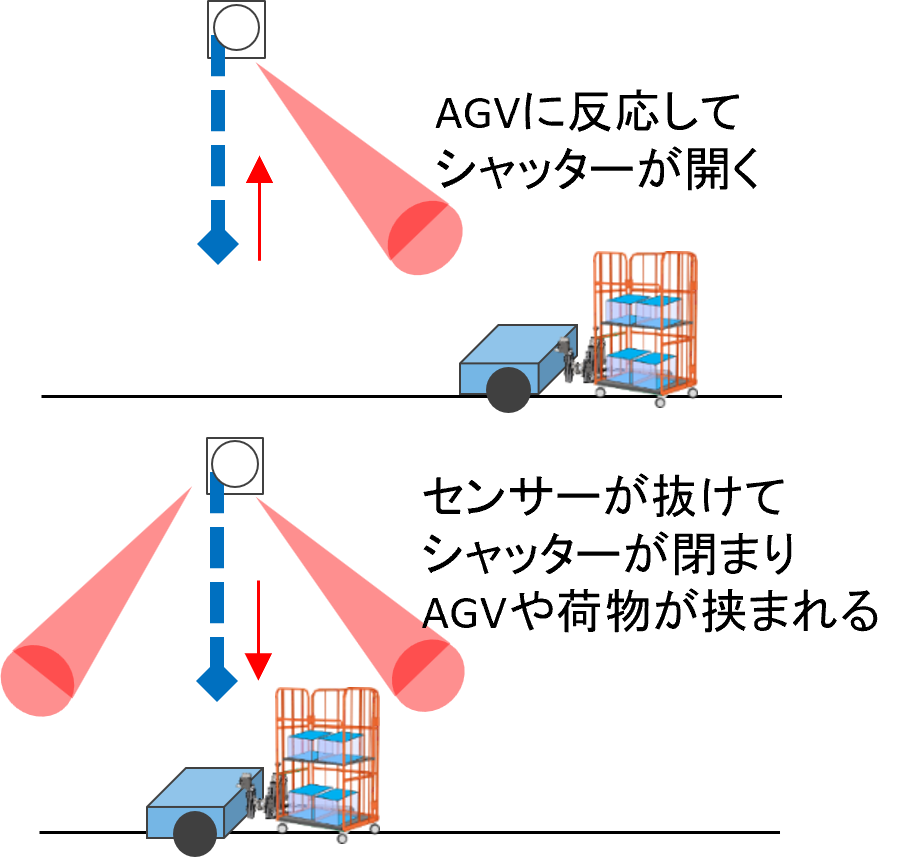
しかし、人感センサーで開き、通過中にAGVが一時停止したり、AGVが牽引しているカゴ台車などの荷物にセンサーが反応しなかった場合、シャッターが閉まり始めます。そのタイミングにAGVが動いていると、シャッターを壊しながら走ることになります。

KEY×CON⁺シートシャッター制御機能を使えば、シャッター手前の入口マークを読んで出口マークを読むまで、ず~っとシートシャッターを開け続けてくれます。人感センサーに頼らないシャッター制御方式です。
防火シャッターの閉鎖障害を防止するSPC制御

【SPCシステムとは】
SPC(Shutter priority control )は、搬送用ロボット(AGV・AMR)が建屋の防火区画を通過する際に防火シャッターの閉鎖障害にならないための制御機器です。
【搬送用ロボットが閉鎖障害になる とは】
【搬送用ロボットが閉鎖障害になる とは】
自動走行で荷物を運ぶ搬送ロボットは、広い建屋内の防火シャッターを幾つも通過します。通過するときに防火シャッターが下降し始めるタイミングによっては、搬送ロボットの障害物センサーで検知できず、シャッターに挟まれることが考えられます。また、ロボットが挟まれなかったとしても、その後ろの搬送荷物がシャッターに挟まれることも考えられます。
この状態が閉鎖障害となり、防火シャッターの機能を阻害する行為となります。
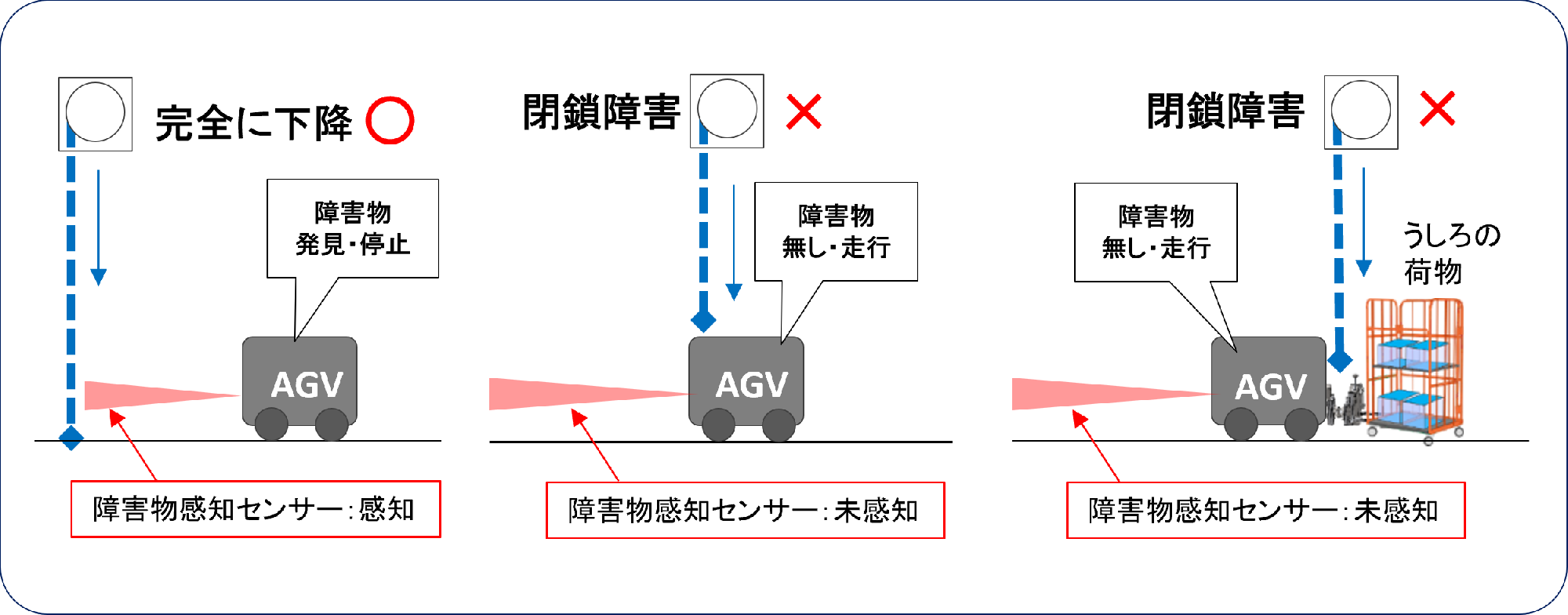
【搬送ロボットに閉鎖障害を起こさせない機能:SPC】
火災において、シャッタの下降は、止めることのできない優先(priority)行動です。よって、搬送ロボットは、防火シャッターの下降状況を随時監視し、停止又は退避通過することで閉鎖障害を回避する必要があります。SPCはシャッターの状態監視と搬送ロボットへの指示を的確に行うための搬送ロボット制御システムです。
